8
www.techno-isel.com
Technical Information
Backlash is defined as the “dead band” experienced when changing directions. This phenomenon is caused
by a clearance between interactive elements in a drive train and/or bearing system. Backlash is typically
found between gears or between a nut and screw. A common and less technical description of backlash is
defined to be the amount of “play” or “slop” in a system. The largest contributing factors to backlash stem
from the drive train and bearings being imprecise or worn. Preloading the drive train and bearings will
remove excess play in a system, and this type of system is generally referred to as “anti-backlash”.
Resolution is defined as the smallest attainable increment of adjustment or positioning. The minimum
amount that a positioning system can be moved is referred to as the system resolution. Among the factors
that determine resolution are the type of motor and control used, and mechanical advantages found within
the drive train.
Lifetime is defined as the cumulative number of linear inches of travel guaranteed by the manufacturer of a
linear motion system. This specification varies greatly with load and speed so care should be taken to
confirm operating conditions.
Friction is defined as a nonconservative force that acts in the opposing direction of a motion. By means of
heat dissipation, friction results in the loss of useful energy and contributes to system wear. As a result of
friction, systems become inefficient, inaccurate, and expensive to maintain. Friction due to rolling contact is
far less than that due to sliding contact. This should be considered when selecting load bearings and drive
trains. For example, lead screws and plain bearings have higher friction forces than ball screws and ball and
roller bearings.
Static analysis is defined as force and torque analysis of a body or system of bodies when they are at rest
(or when they are at “equilibrium”). Although acceleration forces are present in all gravitational fields, they
are counteracted by equal and opposite forces in a static system and motion is constrained. A static load
is a load acting on a body or system of bodies that is supported by an equal and opposite force. This type
of system is analyzed using Newton’s 2nd Law in the case where the accelerations acting on all bodies are
equal to zero.
Dynamic analysis is defined as force, torque and motion analysis of a body or system of bodies when they
are not at rest (or when they are not at “equilibrium”). A dynamic system will have force and torque acting
that are not counteracted, resulting in motion of the body or bodies. A dynamic load is a load that is not
supported by an equal and opposite force and results in a dynamic, or changing system with respect to
motion. This type of system is analyzed using Newton’s 2nd Law in the case where the accelerations acting
on all bodies may be nonzero. Note that dynamic conditions complicate load and life calculations because
of shock loads and vibrations.
12 —
10 —
8 —
6 —
4 —
2 —
0 —
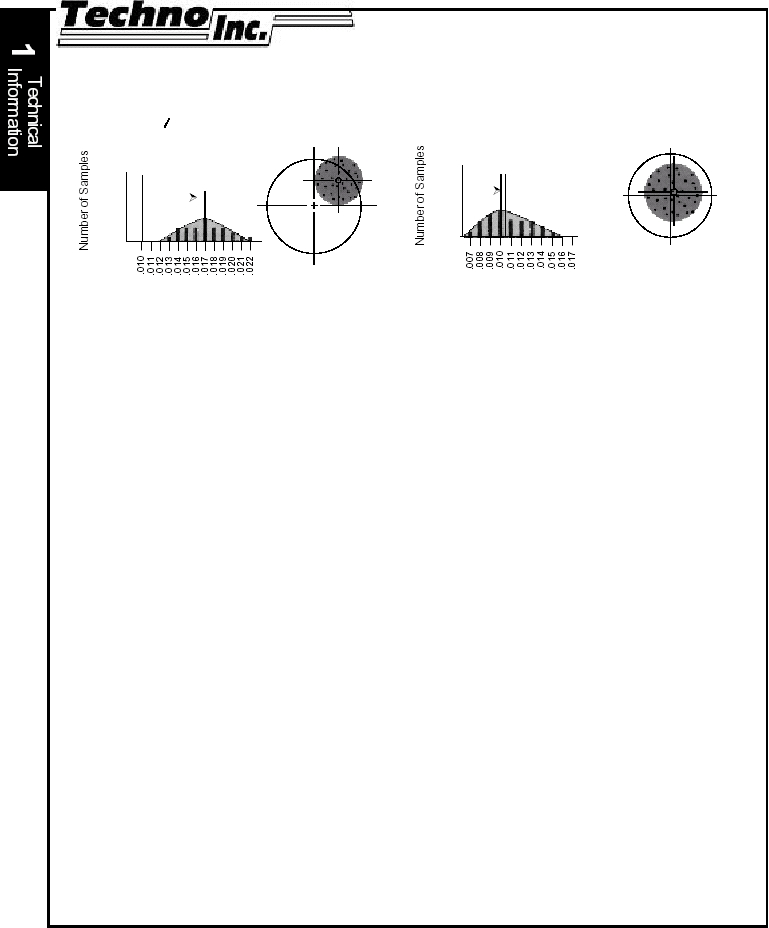
Mean
Position
¯¯
X
Absolute
Position
Case 4: Accurate but not Repeatable
(Mean =~ Absolute Position, s large)
––– Error –––
3
––– Error
3
Mean
Position
¯¯
X
Absolute
Position
Case 3: Not Accurate and not Repeatable
(Mean = Absolute Position, s large)
12 —
10 —
8 —
6 —
4 —
2 —
0 —