Technical Information
techquestions@techno-isel.com
19
5) Ball and Acme Screw Drive Mechanisms
This section will introduce most of the more common types of drive mechanisms found in linear motion
machinery. Ideally, a drive system should not support any loads, with all the loads being handled by a
bearing system. Topics discussed will include, but not be limited to, the mechanism of actuation, efficiency,
accuracy, load transfer, speed, pitch, life cycle, application and maintenance. Each type of drive system will
be accompanied by a diagram and useful equations when applicable. Some of the terms used with screws,
the most common drive component, are as follows:
lead
— advance of the nut along the length of the screw per revolution
pitch
— distance between corresponding points on adjacent thread forms
(pitch = lead / # of starts)
# of threads
— number of teeth found along a unit length of the screw (1 / pitch)
# of starts
— number of helical grooves cut into the length of the shaft
outer diameter
— largest diameter over the threaded section (at top of threads)
root diameter
— smallest diameter over the threaded section (at base of threads)
stub
— specific type of ACME thread where the root diameter is larger to
provide for a more heavy-duty screw (the threads look “stubby”)
critical shaft speed
— operating speed of spinning shaft that produces severe vibrations
during operation. This is a function of length, diameter, and end
supports.
maximum compressive load
— maximum load that can be axially applied to the screw before
buckling or permanent deformation is experienced. Also referred to
as column strength.
end bearing supports
— the screw must be supported at one or both ends with thrust type
bearings. Depending upon the application, it may also be desirable
to provide for a stiffer system by incorporating angular contact
bearings (fixed support).
Although shafts, gear trains, belt and pulley, rack and pinion, and chain and sprocket drives are practical in
other applications, they require special consideration when used in CNC machinery. This is because there
is typically backlash associated with these types of drives, which increases the system error. Thorough
technical descriptions of these types of drives can be found in the Stock Drive Components Library.
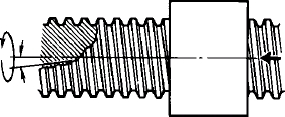
Lead screws are threaded rods that are fitted with a nut.
There are many types of threads used, but the most prevalent
in industry is the ACME lead screw. Because the ACME
thread is an industry standardized thread style, it is easily
interchanged with parts from various manufacturers. The
basic function of a screw is to convert rotary input motion to
linear output motion. The nut is constrained from rotating
with the screw, so as the screw is rotated the nut travels
back and forth along the length of the shaft. The friction on
the nut is a function of environment, lubrication, load, and
duty cycle; therefore, practical life cycle is difficult to quantify.
Lead screw/nut drive systems are available in a variety of sizes and tolerances. Contact is primarily sliding,
resulting in relatively low efficiency and a wear rate proportional to usage. Advantages include the self-
locking capability in back drive mode which is good for vertical applications, low initial costs, near silent
operation, manufacturing ease, and a wide choice of a materials. Disadvantages of ACME screws include
lower efficiencies (typically 30-50%, depending on nut preload) which require larger motor drives, and
unpredictable service life.
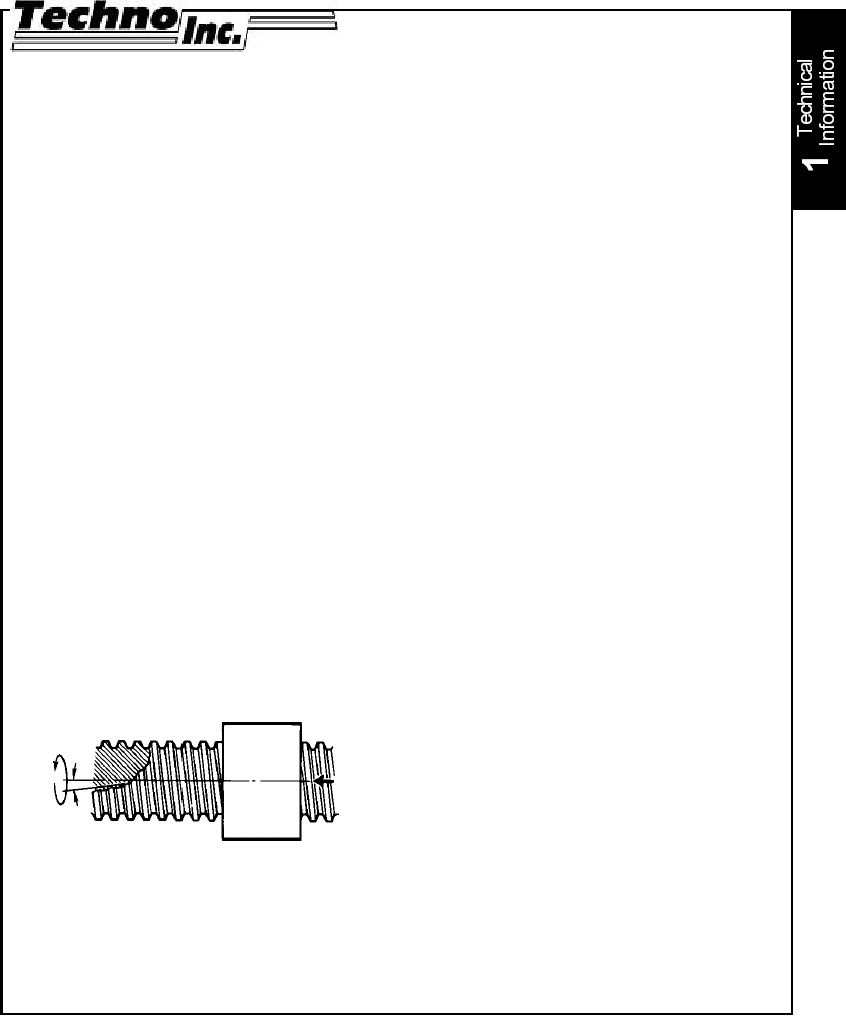
Lead Screw System
Lead Screw
3
Lead Nut
3