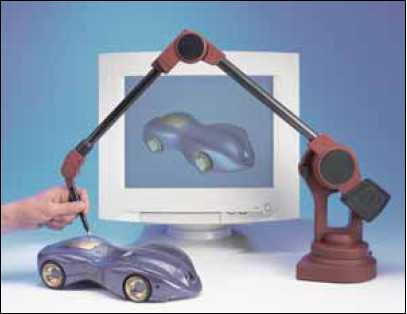
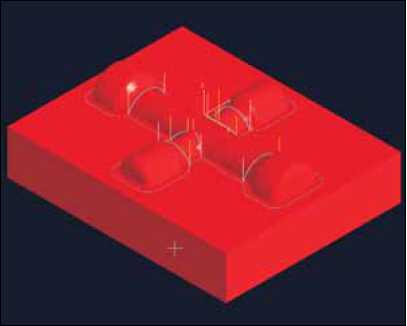
Technical SectionPhone: 516-328-3970www.technocnc.com17scanners determine the relative distance from the scanner to the surface. This is usually the Z coordinate. The machine positioning the scanner usually supplies the travel to collect the X and Y coordinates. Another subcategory of noncontact type of scanner is structured light types. These scanners work with a specific varying intensity of light and multiple images of the object from known positions. A mathematical algorithm is then used to create a surface with the measured amount of reflectivity. This basically recreates the 3D visible surface of the object. The speed and accuracy of the scanner varies greatly depending on the model and drive system of the CNC machine. In addition, the scanners share the same attributes from one manufacturer to another.Types of Laser ScannersThere are a number of different types of laser displacement scanners, each offering advantages in certain applications. Interferometryis probably the most accurate butrequires the greatest precision in the equipment and the surfaces to be measured. Triangulationlooks at the angle of reflection off the target surface and is generally very inexpensive but is limited by the inclination angle of the surface to be measured. Steeper angles produce very erratic results.Dynamic focusinguses a system to adjust the focus of a camera to determine the distance. This method requires moving parts and is thus limited by its speed and cost of equipment.The Conoscope method,used by the Techno laser scanner, uses polarized light and holographic methods to determine the distance to the refl ecting surface. Because only a single beam is used, the angle of the surface does not affect the results and even measurements in “deep holes” can be taken. What to Scan and What to Scan withThe different types of scanners are typically suited for different types of applications. The contact process is usuallymore time consuming but can also be more effi cient for smooth engineered types of surfaces such as the fender of a car. Because of the contact, specific points can be digitized to get the features of the surface, such as an edge or cusp or hole. This allows for the features to be quickly and accurately recognized and digitized. Another advantage of contact scanner arms is that the surface generation is a moresimple process. In most cases, the points being collected aredirectly used for creating splines or features in the software. There is generally little filtering that is required.The noncontact types of scanners are usually faster atcollecting large numbers of data points but they typically are designed to gather points over a grid surface with a specific spacing along the X and Y axes. This process collects what is called a “point cloud” with a greater number of XYZ coordinate pairs. This approach is better suited for collecting data off very detailed surfaces which might be found on hand-carved objects such as furniture or coins. The drawback to this approach is that the features such as the cusps, edges and sharp corners might not be captured completely in the grid being used to collect the data unless the grid is relatively fi ne and then a great number of points have to be collected. Collecting vast amounts of data often creates processing problems. Remember that the number ofdata points increases geometrically as the grid gets fi ner.